



�c�C�������P������ϵ
�����I�C�����IJ��������̺�Ͷ���\�Еr����ϵ������Ҫ�����x���ڙC���˿���ϵ�y�ж��x����������ϵ��
WORLD | ��������ϵ
ROBROOT | �C�����㲿����ϵ
BASE | ������ϵ
FLANGE | ���m����ϵ
TOOL | ��������ϵ
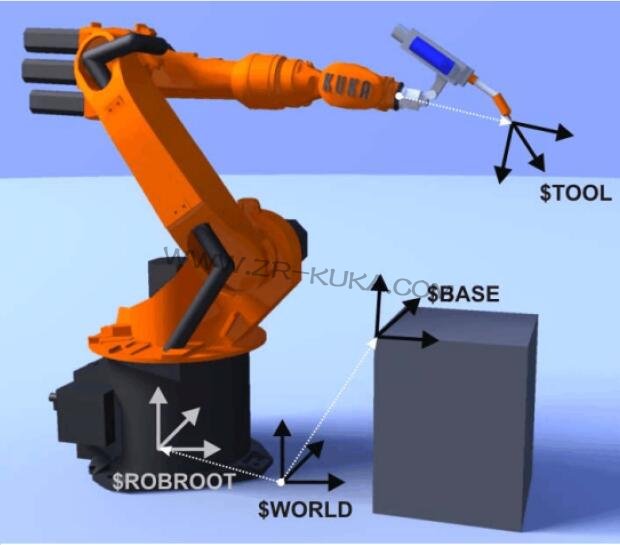
�D 2-6: KUKA �C�����ϵ�����ϵ
| ���Q | � | ���� | ���c |
| WORLD |
�����ɶ��x
|
ROBROOT ��
BASE ��ԭ�c
|
�������r��λ�ڙC�����㲿��
|
|
ROBROOT
|
�̶��ڙC
�������
|
�C���˵�ԭ�c |
�f���C��������������ϵ�е�λ�á�
|
| BASE |
�����ɶ�
�x
|
���������b |
�f������������������ϵ�е�λ�á�
|
| FLANGE |
�̶��ڙC
���˷��m
��
|
TOOL ��ԭ�c | ԭ�c��C���˷��m���ġ� |
| TOOL |
�����ɶ�
�x
|
���� |
TOOL ����ϵ��ԭ�c���Q��“TCP ”��
�� TCP = Tool Center
Point �������������c�� ��
|