



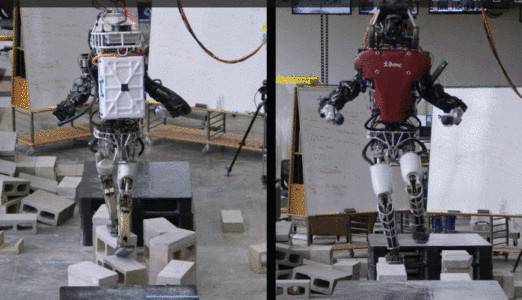
�������գ�IHMC����������c�C���J֪�о��������������������_�l���C������������ϵ�y�����������˲�ʿ�D������Atlas�C�����ϣ�����Atlas��DARPA���������������о�Ӌ���֙C��������ِ���Ы@���˵ڶ�����
������������������ϵ�y��Atlas���܉�ͨ�^����������������·���ҵ���ѵ����߷����������÷������һ��Խ�^�ϵK���C���˾S����ƽ��ǰ�M��
����Ŀǰ����������������ϵ�y��Atlas�ڪMխ��·�����������ɹ��ʞ�50%��������·�Č����ɹ��ʞ�90%���@����������ϵ�y�ѽ��������˲�ʿ�D������Atlas�C���˺���������_�l�� Valkyrie�C�����ϡ�
����һ���C���������������`��Ҏ��·��
����IHMC���о��ˆT��ʾ������ͨ�^�о�������Ȳ��\�ӣ��������ַ����ķ�����ͨ�^һϵ�е��㷨�о����C������������ϵ�y�܉�����C����Ѹ���R�e��·�h���������Mխ��·��ƽ��ǰ�M��
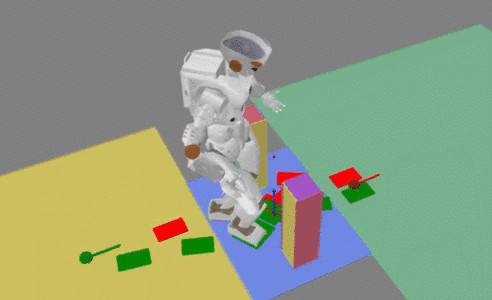
������������ϵ�yͨ�^�������R�e�h���������h��ģ�ͣ���ߙC���˵�·��Ҏ���������`��đ���·��׃�������_�ϵK�
����ϵ�yͨ�^�㷨��ÿһ�����\���M�з����u�����ҵ���ѵ��Ƅ�λ�ã�ͨ�^�����·���z���M���{����������δ��֪�����ϵK�C����߀����ԭ·���أ������c����Ҏ���µ����M·����

�������ΙC���˵�һ���������M���p�����ߣ�KUKA�C���˾S����IHMC�ęC������������ϵ�y����ʹ�C�����ڲ�ͬ�����б���ƽ�⣬��Ч��̎���ⲿ�ɔ_������������ɸ��y�ȵ���������IHMC߀���@�N��������ϵ�y���õ��˟o�˵���܇�v��UGV�����o���w������UAV���С�
��������Atlas�ڙC��������ِ�Ы@�ڶ�
����DARPA�C��������ِ����һ�ּ����ߵ���C���ˑ����ĺ������ć��H��ِ��IHMC��DARPA��ِ��ʹ���˲�ʿ�D������Atlas�C���ˣ����@���˵ڶ����ijɿ���
����Ŀǰ���������о����c���c������ֵ���̽���Ŀ�����C������������Ҏ��ϵ�y������������ֵ����ΙC����Valkyrie�ϣ��h�̲�����˙C���ˁ�������еĹ�����
����IHMC���о��ˆT���@�N�C����ϵ�y�Č��H���ã��OӋ�ˎN��ͬ�ęC������֫�b�ã������Á�f�������c�������Єӡ�������ȫ��ʿ�\���������Լ���T��̫��վ����Ӗ����
�����Y�Z�����������C���ˌ��ЏV����;
�����p����˙C�����܉���`����M����N�����h����IHMC�_�l����������ϵ�y�܉F�C�������ϵK�h�����ҵ����·������ƽ��ǰ�M��
�����C������������ϵ�y��·��Ҏ��������KUKA�C���˾S�����;S�֙C����ƽ����������܉����ڈ��в�ͬ�����ęC�����С����磬�ȞęC���˺͟o���{���܇�����������������ڏ��s�ĵ����аl�]�����á�